| |

Concept of Edge DetectionThe concept of edge detection is used to detect the location and presence of edges by making changes in the intensity of an image. Different operations are used in image processing to detect edges. It can detect the variation of grey levels but it quickly gives response when a noise is detected. In image processing, edge detection is a very important task. Edge detection is the main tool in pattern recognition, image segmentation and scene analysis. It is a type of filter which is applied to extract the edge points in an image. Sudden changes in an image occurs when the edge of an image contour across the brightness of the image. In image processing, edges are interpreted as a single class of singularity. In a function, the singularity is characterized as discontinuities in which the gradient approaches are infinity. As we know that the image data is in the discrete form so edges of the image are defined as the local maxima of the gradient. lll Mostly edges exits between objects and objects, primitives and primitives, objects and background. The objects which are reflected back are in discontinuous form. Methods of edge detection study to change a single pixel of an image in gray area. Edge detection is mostly used for the measurement, detection and location changes in an image gray. Edges are the basic feature of an image. In an object, the clearest part is the edges and lines. With the help of edges and lines, an object structure is known. That is why extracting the edges is a very important technique in graphics processing and feature extraction. The basic idea behind edge detection is as follows:
NOTE: edge detection cannot be performed when there are noise and blurring image.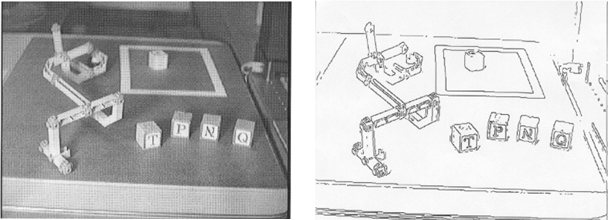
There are 5 edge detection operators they are as follows: 1. Sobel Edge Detection Operator The Sobel edge detection operator extracts all the edges of an image, without worrying about the directions. The main advantage of the Sobel operator is that it provides differencing and smoothing effect. Sobel edge detection operator is implemented as the sum of two directional edges. And the resulting image is a unidirectional outline in the original image. 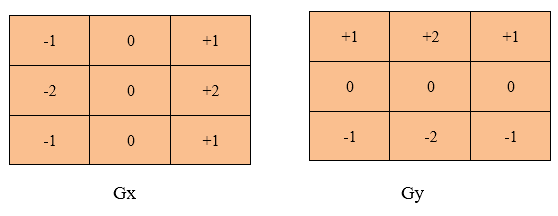
Sobel Edge detection operator consists of 3x3 convolution kernels. Gx is a simple kernel and Gy is rotated by 90° These Kernels are applied separately to input image because separate measurements can be produced in each orientation i.e Gx and Gy. Following is the gradient magnitude: 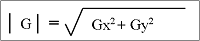
As it is much faster to compute An approximate magnitude is computed: 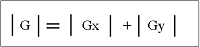
2. Robert's cross operator Robert's cross operator is used to perform 2-D spatial gradient measurement on an image which is simple and quick to compute. In Robert's cross operator, at each point pixel values represents the absolute magnitude of the input image at that point. Robert's cross operator consists of 2x2 convolution kernels. Gx is a simple kernel and Gy is rotated by 90o 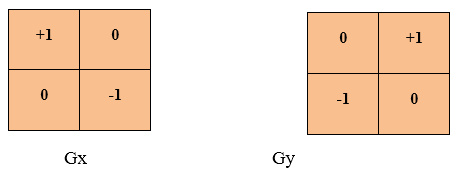
Following is the gradient magnitude: 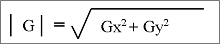
As it is much faster to compute An approximate magnitude is computed: 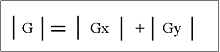
3. Laplacian of Gaussian The Laplacian of Gaussian is a 2-D isotropic measure of an image. In an image, Laplacian is the highlighted region in which rapid intensity changes and it is also used for edge detection. The Laplacian is applied to an image which is been smoothed using a Gaussian smoothing filter to reduce the sensitivity of noise. This operator takes a single grey level image as input and produces a single grey level image as output. Following is the Laplacian L(x,y) of an image which has pixel intensity value I(x, y). 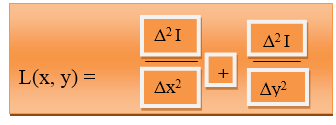
In Laplacian, the input image is represented as a set of discrete pixels. So discrete convolution kernel which can approximate second derivatives in the definition is found. 3 commonly used kernels are as following: 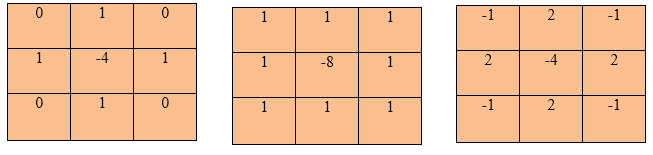
This is 3 discrete approximations which are used commonly in Laplacian filter. Following is 2-D Log function with Gaussian standard deviation: 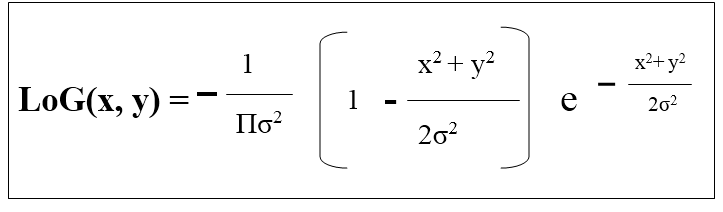
4. Prewitt operator Prewitt operator is a differentiation operator. Prewitt operator is used for calculating the approximate gradient of the image intensity function. In an image, at each point, the Prewitt operator results in gradient vector or normal vector. In Prewitt operator, an image is convolved in the horizontal and vertical direction with small, separable and integer-valued filter. It is inexpensive in terms of computations. 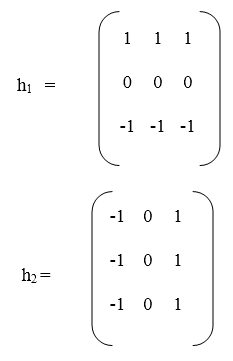
Next TopicIntroduction to Frequency domain
|
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








