| |

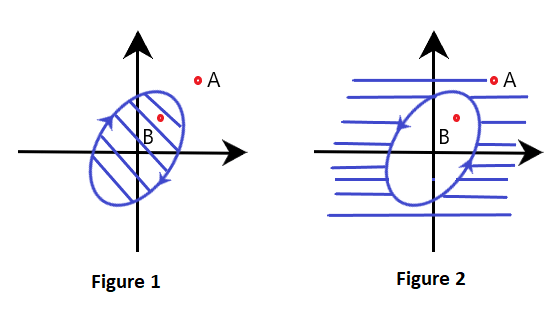
Nyquist plotThe extension of the polar plot is known as the Nyquist plot. The frequency in the case of the Nyquist plot varies from -infinity to infinity. The primary difference between the polar plots and the Nyquist plot is that the polar plots are based on frequencies range from zero to infinity, while the Nyquist plot also deals with negative frequencies. The Nyquist criteria help us determine the closed-loop system's stability from the frequency response of the open-loop poles and plot. We know that F(s) is a function of s. The polynomial in the numerator and denominator of the system in terms of s can be represented as: F(s) = (s - z1)(s - z2)... (s - zm)/(s - p1)(s - p2)... (s - pn) The roots of the numerator, when equated to zero, determine the zeroes of the system, and the root of the denominator determines the poles of the system. It means that the given function has m number of zeroes and n number of poles. The numerical value of n is usually greater or equal to m. S in the function is a complex variable, and it is given by σ + jω. Thus, F(s) is also a complex function that can be represented in the form u + jv. It means that for every point of s in the s-plane at which the F(s) is analytic, there exists a corresponding point in the F(s) plane. The function f(s) maps into the f(s) plane. There is a contour that maps on the contour on the other side. In the Nyquist plot, we will detect the presence of the closed-loop system poles in the right half of the s-plane to determine the system's stability. It is because the Nyquist plot relates the open loop frequency response (given by G(jω)H(jω)) to the number of poles and zeroes of 1 + G(s)H(s) that lie in the right-half of the s-plane. Contour in s-planeThe direction of the contour in the s-plane can either enclose or encircle the point in the s-plane, and the point can be a zero or a pole. First, let's discuss the concept of encircle and enclose because both terms are useful while implementing the Nyquist stability criterion. Encircled: If a point is said to lie inside the closed path, it is said to be encircled. It is shown below: 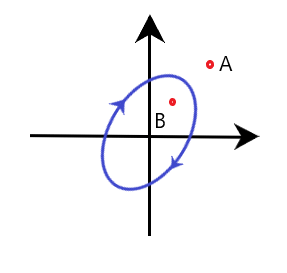
Here, point B is encircled in the closed path in a clockwise direction, while the point A lies outside the path.
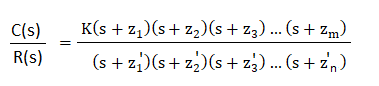
Nyquist stability criteriaThe closed loop transfer function is given by: C(s)/R(s) = G(s)/(1 + G(s)H(s)) Where, C(s) is the output of the given control system R(s) in the input of the given control system H(s) is the feedback path G(s) is the forward path of a system The characteristic equation of the system is given by the condition 1 + G(s)H(s) = 0. We know that G(s)H(s) in terms of zeroes and poles is given by: 
The value of m is less or equal to n. It means that for an ideal control system, the number of zeroes is always less than or equal to the number of poles in a given control system. Let, F(s) = 1 + G(s)H(s) Putting the value of G(s)H(s) in the above equation, we get: 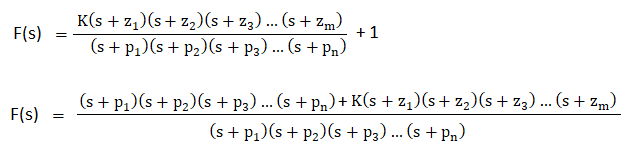
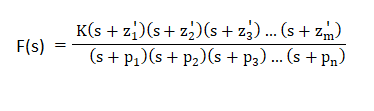
Thus, z1', z2'... zn' are the zeroes of the function F(s). Now, let's combine the values of G(s), 1 + G(s)H(s) in the transfer function, which is given by: C(s)/R(s) = G(s)/(1 + G(s)H(s)) 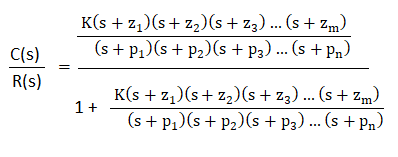
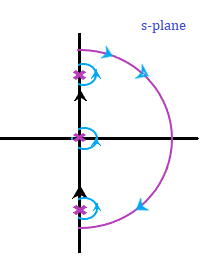
z1', z2', z3', and zn' are the poles of the above transfer function. The Nyquist stability criterion is based on the point -1 + j0 to determine the stability of the closed loop system. It is because the contour of the function F(s) with respect to the origin of the plane is same as the contour of the F(s) -1 plane with respect to the point -1 + j0. The point -1 + j0 on the axis will appear as: 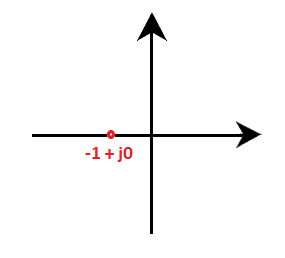
Let's discuss the Nyquist stability criteria in terms of encirclement, anticlockwise encircle, and clockwise encirclement.
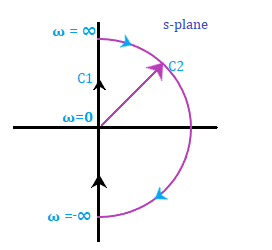
Stability analysis to draw the Nyquist plotHere, we will discuss the steps that will help in the stability analysis to draw the Nyquist plot.
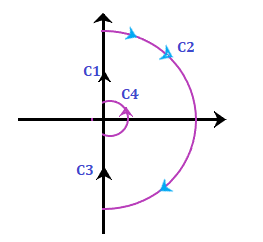
Where, Y is the number of poles. Note: If there are no poles at the origin of the Nyquist plot, the section C4 will be absent.Let's discuss an example of the Nyquist plot for better understanding. We will follow the steps discussed above. ExamplesConsider the below example: Example: Draw the Nyquist plot for the system whose open loop transfer function is given by: G(s)H(s) = K/s(s + 2)(s + 10) Also determine the range of K for which the system is stable. Solution: The transfer function is given by: G(s)H(s) = K/s(s + 2)(s + 10) Step 1: Determining the poles and zeroes. Since, the transfer function has no numerator in terms of s, there are no zeroes present in the function. There are only three poles. G(s)H(s) = K/sx20(s/2 + 1)(s/10 + 1) G(s)H(s) = 0.05K/s(1 + 0.5s)(1 + 0.1s) The open loop function has a pole at the origin, which is shown below: 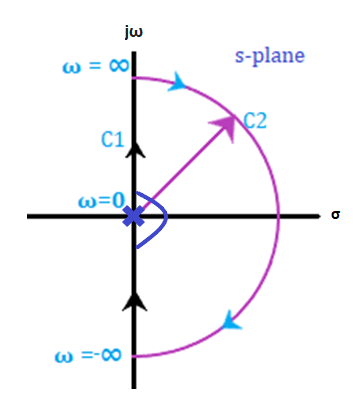
Now, we will perform the mapping of all four sections separately. At last, all four sections will be combined to produce the desired results. Step 2: Mapping of section C1 The value of ω in section C1 ranges from 0 to infinity. The contour will be drawn in G(s)H(s) plane with respect to the above range will be the locus plot of G(jω)H(jω). G(s)H(s) = 0.05K/s(1 + 0.5s)(1 + 0.1s) G(jω)H(jω) = 0.05K/ jω(1 + 0.5jω)(1 + 0.1jω) G(jω)H(jω) = 0.05K/ jω(1 + 0.6jω - 0.05ω2) G(jω)H(jω) = 0.05K/-0.6 ω2 + jω(1 - 0.05ω2) The corresponding imaginary term will be 0 and the resulted frequency will be the crossover phase frequency, which is given by: ω(1 - 0.05ω2) = 0 1 - 0.05ω2 = 0 ω = 4.472 radians/second = crossover phase frequency Now, we will put the value of the above frequency in the real part of the G(jω)H(jω), which is given by: G(jω)H(jω) = 0.05K/-0.6 ω2 G(jω)H(jω) = 0.05K/-0.6x 4.472 x 4.472 G(jω)H(jω) = -0.00417K From the given transfer function, we can easily determine that the system is of type 1 and order 3. The polar plot will start at -90 degrees, crosses the point -0.00417K on the real axis, as shown below: 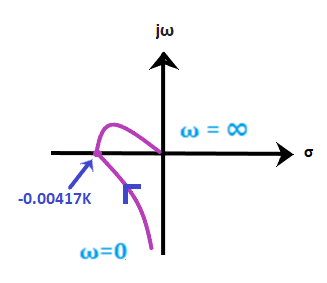
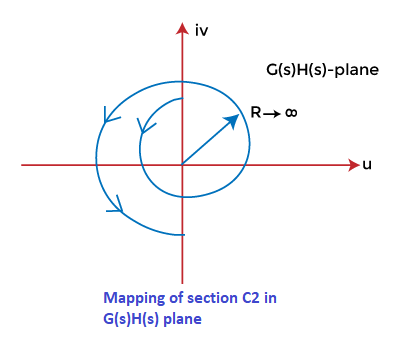
Step 3: Mapping of section C2 The range of the second section is from -90 degrees to +90 degrees. It can be obtained by: 
If the transfer function is in the form G(s)H(s) = 0.05K/s(1 + 0.5s)(1 + 0.1s), the term (1 + sT) can be assumed as sT. It is given by: G(s)H(s) = 0.05K/s x 0.5s x 0.1s G(s)H(s) = 0.05K/0.05s3 G(s)H(s) = K/s3 Let, the value of s be: 
The value of the transfer function at the specific value of theta will be: 
Thus, the section C2 varying from -270 degrees to 270 degrees will appear as the plane shown in the below image: 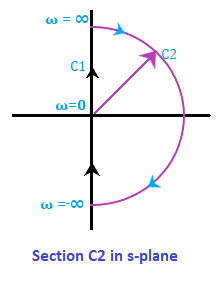
Step 4: Mapping of section C3 We know that the section C3 is simply the inverse of section C1. Thus, the locus plot of the section C3 will be the increase on the real axis at the same point, as shown below: 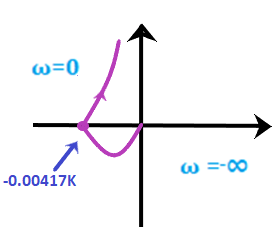
Step 5: Mapping of section C4 Let's plot the C4 section of the Nyquist plot. Let's plot the C4 section of the Nyquist plot. The argument of the fourth section varies from-90 degrees to 90 degrees. The Nyquist contour of this section has a semicircle of zero radii. The condition gives the mapping of the section C4: 
If the transfer function is in the form G(s)H(s) = 0.05K/s(1 + 0.5s)(1 + 0.1s), the term (1 + sT) can be assumed as 1. It is given by: G(s)H(s) = 0.05K/s x 1 x 1 G(s)H(s) = 0.05K/s Let, the value of s be: 
The value of the transfer function at the specific value of theta will be: 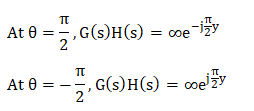
We can say that the section C4 is mapped in the s-plane as a circular arc of infinite radius. The locus is shown below: 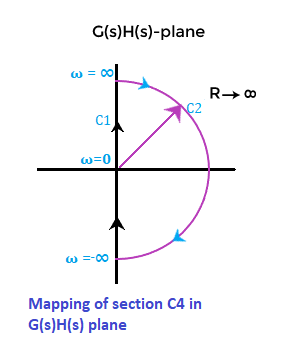
Step 6: Stability analysis We will find the value of K when the contour passes through the point (-1 + j0). -0.00417K = -1 The limiting value of K will be: K = 1/0.00417 K = 240 Step 7: Complete Nyquist plot The complete Nyquist plot after combining all the above four sections are shown below: 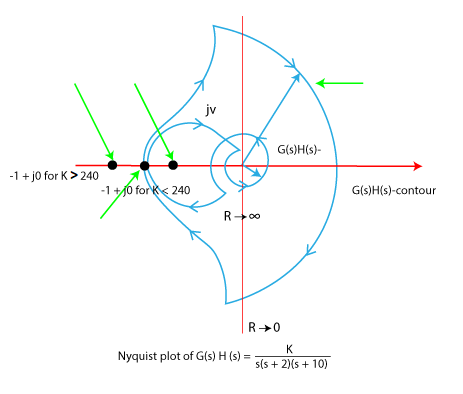
We will find the stability at the two values of K. K< 240 When the value of K is less than 240, the contour does not cross the real axis, and the point -1 + j0 is not encircled. There are no poles on the right half of the s-plane. Hence, the system at this value of K is stable. K>240 When the value of K is greater than 240, the contour crosses the real axis, and the point -1 + j0 is encircled two times in the clockwise direction. There are no poles on the right half of the s-plane. Hence, the system at this value of K is unstable. Thus, for the stability of the given transfer function, the value of K is 0 < K < 240. Advantages of the Nyquist plotThe advantages of the Nyquist plot are as follows:
Disadvantages of the Nyquist plotThe disadvantages of the Nyquist plot are as follows:
Next TopicP, PI and PID Controller
|
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








