| |

What is the Full Form of SMT(i) SMT: Simultaneous MultithreadingSMT stands for Simultaneous Multithreading. It is a strategy for increasing the overall efficiency of superscalar CPUs using hardware multithreading. It enables several independent execution threads to use the resources made available by contemporary processor architectures. 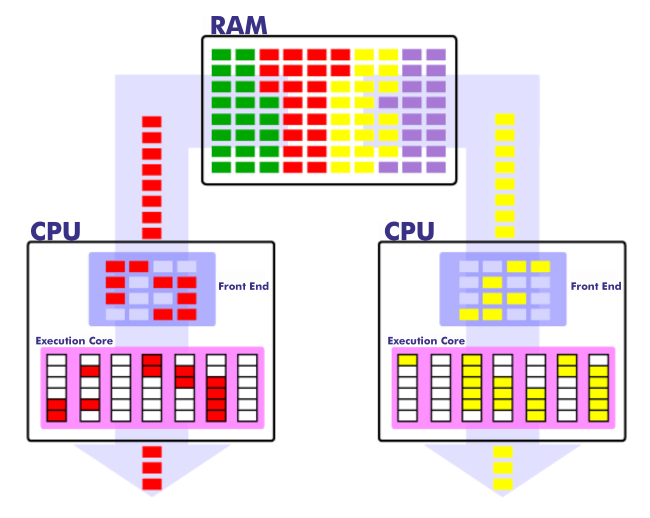
The word "multithreading" is confusing since not only may several threads be processed concurrently on a single CPU core, but also many jobs (with various page tables, task state segments, protection rings, I/O permissions, and so on). Despite sharing the same core, they are entirely distinct operations. Pre-emptive multitasking is conceptually related to multithreading. Nonetheless, it is implemented at the thread level in current superscalar CPUs. Simultaneous multithreading is one of two significant forms of multithreading, the other being temporal multithreading. Only one thread of instructions can run at any pipeline stage at any given moment in temporal multithreading. Multiple threads can be implemented at any pipeline level during multithreading. This is accomplished without requiring significant changes to the fundamental processor architecture: the principal enhancements required are the ability to collect instructions from many threads in a cycle and a bigger register file to carry data from several lines. The supported number of concurrent threads is determined by chip designers. The most frequent number of concurrent threads per CPU core is two. Some processors, however, support up to eight simultaneous threads per core. Measuring or agreeing on its (SMT) success might be challenging since it invariably creates a conflict over shared resources. Previous Intel SMT implementations' predicted energy efficiency with parallel native and managed workloads, on the other hand, revealed that SMT is highly energy efficient in 45 nm and 32 nm implementations, even with in-order Atom processors. SMT uses concurrency in existing systems with relatively low dynamic power. Even if the performance increase is modest, the power consumption savings can be significant. Some researchers have demonstrated that the additional threads may be utilized to seed a shared resource, such as a cache, in order to increase the performance of another single thread. This demonstrates that SMT does more than only improve efficiency. Many manufacturers also employ SMT to offer redundant computation for error detection and recovery. However, in most modern applications, SMT is about concealing memory delay, boosting efficiency, and increasing compute speed per amount of hardware employed. (ii) SMT: Surface-Mount TechnologySMT also stands for Surface-mount technology. It is a method of mounting electrical components directly onto a printed circuit board (PCB) surface. A surface-mount device (SMD) is an electrical item placed in this manner. This methodology has essentially supplanted the through-hole technology construction method of fitting components in the industry, owing to higher production automation, lower costs and improved quality. It also enables more parts to be accommodated on a given substrate space. Both technologies may coexist on the same circuit board. Through-hole technology, such as big transformers and heatsinked power semiconductors, is frequently used for elements that cannot be mounted on the surface. 
Because it has fewer or no leads, an SMT component is generally smaller than a through-hole component. It may contain several short pins or leads, flat contacts, a matrix of solder balls, or terminations on the component's body. A Brief HistorySurface mounting was initially referred to as "planar mounting". In the 1960s, surface-mount technology was first invented. Surface-mounted components accounted for just 10% of the market in 1986, but they rapidly gained prominence later. Surface mount devices controlled the vast majority of high-tech electronic printed circuit assemblies by the late 1990s. IBM laid the basis for this technology. IBM originally tested the architectural method utilized in the Launch Vehicle Digital Computer, which directed every Saturn IB and Saturn V spacecraft, in a small-scale computer in 1960. Components were rebuilt mechanically to include small metal tabs or end caps that could be soldered directly to the PCB surface. Surface mounting became considerably more familiar with component placement on both sides of a board than through-hole installation, enabling substantially larger circuit densities and thinner circuit boards, as well as machines or subassemblies that contained the panels. (iii) SMT: Sequential Manual TransmissionSMT also stands for Sequential Manual Transmission, often known as a sequential gearbox or sequential transmission. It is a non-synchronous manual transmission commonly employed in motorcycles and racing vehicles. Shift times are less than with standard synchronized manual gearboxes. This prevents the driver from selecting the next or rear gear other than the defined sequence shown below. 
A sequential manual transmission is unsynchronized, enabling the driver to pick either the next gear or the prior gear through electronic paddle shifters positioned behind the steering wheel or a sequential shifter. This limitation prevents the driver from inadvertently picking the incorrect equipment and purposefully "skipping" gears. When dog clutches are used instead of synchromesh, shift speeds are quicker than in a standard manual gearbox. A sequential manual transmission's shift lever engages a ratchet mechanism, which translates the shift lever's fore-and-aft action into the rotation of a selection disc having three or four tracks machined around its circumference. The tracks either directly or indirectly influence the fork selection. The tracks diverge around the rim, and the selection forks are shifted as the drum turns to pick the needed gear. A sequential manual transmission is different. It should not get confused with the "sequential" shifting system used in hydraulic automatic transmissions. It is branded as "Tiptronic" or "SportShift". This feature allows the driver to pick the previous or next gear using buttons or a lever (often located near the gear changer or steering wheel); nonetheless, the gearbox's mechanicals is unrelated to an accurate sequential manual transmission. The majority of bikes have a sequential manual gearbox. The rider uses their foot to manipulate the gear shifter, enabling their hands to stay on the handlebars. In most bikes, the gear selection scheme is 1 - N - 2 - 3 - 4 - 5 - 6. On the other hand, most modern motor scooters have a hydraulic automatic transmission or a belt-driven or chain-driven continuously variable transmission rather than a sequential manual transmission. Underbones, like the Honda Super Cub, feature a semi-automatic transmission with an automated centrifugal clutch but maintain the traditional foot-operated shifting lever. (iv) SMT: Satisfiability Modulo TheoriesSMT also stands for Satisfiability Modulo Theories. It refers to the problem of determining whether a mathematical formula is satisfiable. It extends the Boolean satisfiability problem to more complicated processes that use actual numbers, integers, and/or diverse data structures, including lists, arrays, bit vectors, and strings. The term stems from the fact that these assertions are encompassed by "modulo", a particular formal theory in first-order logic with equality (often disallowing quantifiers). SMT solvers are programmes that attempt to solve the SMT issue for a specific set of inputs. SMT solvers like z3 and cvc5 have been used as building blocks in various computer science applications, including automated theorem proving, programme analysis, programme verification, and software testing. 
The SMT issue is often NP-hard since Boolean satisfiability is already NP-complete. It is debatable for many hypotheses. The computing cost of decidable examples is being investigated, as well as whether theories or subsets of theories lead to a decidable SMT problem. The resulting decision procedures are commonly directly implemented in SMT solvers; for example, Presburger arithmetic's decidability. SMT is a constraint fulfilment issue and, consequently, a specific structured method for constraint programming. An SMT instance is a first-order logic formula with many interpretations for particular functions and predicate symbols. The challenge of SMT is establishing whether or not such a formula is adequate. Consider a Boolean satisfiability problem in which certain binary variables are substituted by predicates over an appropriate collection of non-binary variables. A predicate is a non-binary function with a binary value. Linear inequalities or equalities using uninterpreted words and function symbols are examples of predicates. These predicates are categorized according to the theory to which they are attributed. For example, linear inequalities over actual variables are assessed using fundamental linear arithmetic theory principles. On the other hand, predicates involving uninterpreted words and function symbols are investigated using principles from the theory of uninterpreted functions with equality. Other approaches include array and list structure theories (important for modelling and evaluating computer programmes) and bit vector theory (helpful in modelling and verifying hardware designs). Difference logic, for example, is a sub-theory of linear arithmetic in which each inequality is constrained to having the form display style x-y>cx-y>c for variables display style xx and display style yy and constant display style cc. Most SMT solvers only allow quantifier-free logic fragments.
Next TopicFull Form
|
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








