| |

What is the Role of Planning in Artificial Intelligence?Artificial intelligence is an important technology in the future. Whether it is intelligent robots, self-driving cars, or smart cities, they will all use different aspects of artificial intelligence!!! But Planning is very important to make any such AI project. Even Planning is an important part of Artificial Intelligence which deals with the tasks and domains of a particular problem. Planning is considered the logical side of acting. Everything we humans do is with a definite goal in mind, and all our actions are oriented towards achieving our goal. Similarly, Planning is also done for Artificial Intelligence. For example, Planning is required to reach a particular destination. It is necessary to find the best route in Planning, but the tasks to be done at a particular time and why they are done are also very important. That is why Planning is considered the logical side of acting. In other words, Planning is about deciding the tasks to be performed by the artificial intelligence system and the system's functioning under domain-independent conditions. What is a Plan?We require domain description, task specification, and goal description for any planning system. A plan is considered a sequence of actions, and each action has its preconditions that must be satisfied before it can act and some effects that can be positive or negative. So, we have Forward State Space Planning (FSSP) and Backward State Space Planning (BSSP) at the basic level. 
1. Forward State Space Planning (FSSP)FSSP behaves in the same way as forwarding state-space search. It says that given an initial state S in any domain, we perform some necessary actions and obtain a new state S' (which also contains some new terms), called a progression. It continues until we reach the target position. Action should be taken in this matter.
2. Backward State Space Planning (BSSP)BSSP behaves similarly to backward state-space search. In this, we move from the target state g to the sub-goal g, tracing the previous action to achieve that goal. This process is called regression (going back to the previous goal or sub-goal). These sub-goals should also be checked for consistency. The action should be relevant in this case.
So for an efficient planning system, we need to combine the features of FSSP and BSSP, which gives rise to target stack planning which will be discussed in the next article. What is planning in AI?Planning in artificial intelligence is about decision-making actions performed by robots or computer programs to achieve a specific goal. Execution of the plan is about choosing a sequence of tasks with a high probability of accomplishing a specific task. Block-world planning problem
The start position and target position are shown in the following diagram. 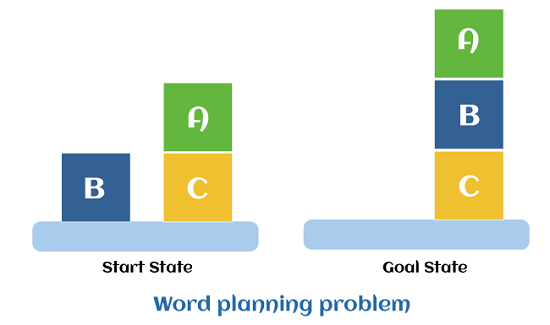
Components of the planning system The plan includes the following important steps:
Target stack plan
The important steps of the algorithm are mentioned below:
iii. If the stack top is an action, pop it off the stack, execute it and replace the knowledge base with the action's effect. If the stack top is a satisfactory target, pop it off the stack. Non-linear PlanningThis Planning is used to set a goal stack and is included in the search space of all possible sub-goal orderings. It handles the goal interactions by the interleaving method. Advantages of non-Linear Planning Non-linear Planning may be an optimal solution concerning planning length (depending on the search strategy used). Disadvantages of Nonlinear Planning It takes a larger search space since all possible goal orderings are considered. Complex algorithm to understand. Algorithm
|
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








