| |

Reinforcement Learning Tutorial
Our Reinforcement learning tutorial will give you a complete overview of reinforcement learning, including MDP and Q-learning. In RL tutorial, you will learn the below topics:
What is Reinforcement Learning?
Terms used in Reinforcement Learning
Key Features of Reinforcement Learning
Approaches to implement Reinforcement LearningThere are mainly three ways to implement reinforcement-learning in ML, which are:
Elements of Reinforcement LearningThere are four main elements of Reinforcement Learning, which are given below:
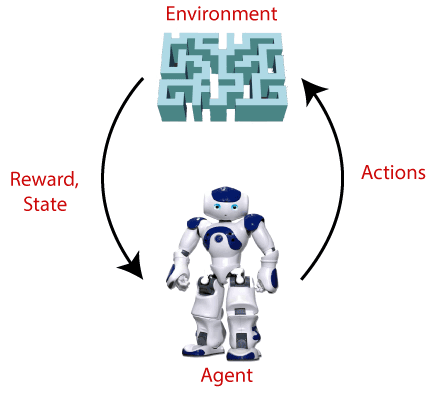
1) Policy: A policy can be defined as a way how an agent behaves at a given time. It maps the perceived states of the environment to the actions taken on those states. A policy is the core element of the RL as it alone can define the behavior of the agent. In some cases, it may be a simple function or a lookup table, whereas, for other cases, it may involve general computation as a search process. It could be deterministic or a stochastic policy: For deterministic policy: a = π(s) 2) Reward Signal: The goal of reinforcement learning is defined by the reward signal. At each state, the environment sends an immediate signal to the learning agent, and this signal is known as a reward signal. These rewards are given according to the good and bad actions taken by the agent. The agent's main objective is to maximize the total number of rewards for good actions. The reward signal can change the policy, such as if an action selected by the agent leads to low reward, then the policy may change to select other actions in the future. 3) Value Function: The value function gives information about how good the situation and action are and how much reward an agent can expect. A reward indicates the immediate signal for each good and bad action, whereas a value function specifies the good state and action for the future. The value function depends on the reward as, without reward, there could be no value. The goal of estimating values is to achieve more rewards. 4) Model: The last element of reinforcement learning is the model, which mimics the behavior of the environment. With the help of the model, one can make inferences about how the environment will behave. Such as, if a state and an action are given, then a model can predict the next state and reward. The model is used for planning, which means it provides a way to take a course of action by considering all future situations before actually experiencing those situations. The approaches for solving the RL problems with the help of the model are termed as the model-based approach. Comparatively, an approach without using a model is called a model-free approach. How does Reinforcement Learning Work?To understand the working process of the RL, we need to consider two main things:
Let's take an example of a maze environment that the agent needs to explore. Consider the below image: 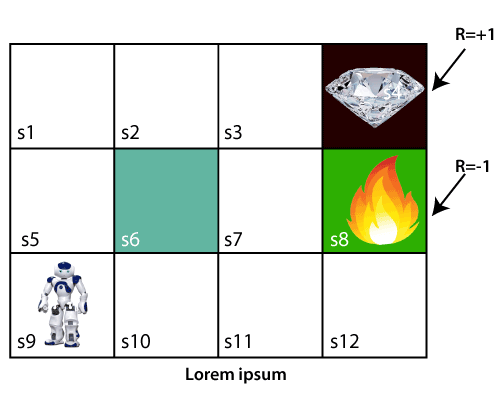
In the above image, the agent is at the very first block of the maze. The maze is consisting of an S6 block, which is a wall, S8 a fire pit, and S4 a diamond block. The agent cannot cross the S6 block, as it is a solid wall. If the agent reaches the S4 block, then get the +1 reward; if it reaches the fire pit, then gets -1 reward point. It can take four actions: move up, move down, move left, and move right. The agent can take any path to reach to the final point, but he needs to make it in possible fewer steps. Suppose the agent considers the path S9-S5-S1-S2-S3, so he will get the +1-reward point. The agent will try to remember the preceding steps that it has taken to reach the final step. To memorize the steps, it assigns 1 value to each previous step. Consider the below step: 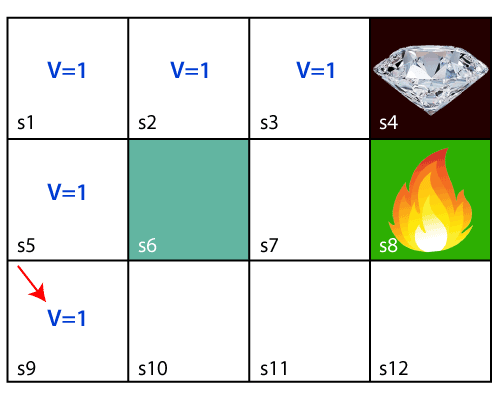
Now, the agent has successfully stored the previous steps assigning the 1 value to each previous block. But what will the agent do if he starts moving from the block, which has 1 value block on both sides? Consider the below diagram: 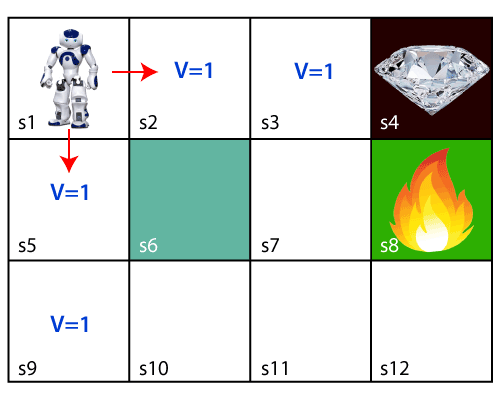
It will be a difficult condition for the agent whether he should go up or down as each block has the same value. So, the above approach is not suitable for the agent to reach the destination. Hence to solve the problem, we will use the Bellman equation, which is the main concept behind reinforcement learning. The Bellman EquationThe Bellman equation was introduced by the Mathematician Richard Ernest Bellman in the year 1953, and hence it is called as a Bellman equation. It is associated with dynamic programming and used to calculate the values of a decision problem at a certain point by including the values of previous states. It is a way of calculating the value functions in dynamic programming or environment that leads to modern reinforcement learning. The key-elements used in Bellman equations are:
The Bellman equation can be written as: Where, V(s)= value calculated at a particular point. R(s,a) = Reward at a particular state s by performing an action. γ = Discount factor V(s`) = The value at the previous state. In the above equation, we are taking the max of the complete values because the agent tries to find the optimal solution always. So now, using the Bellman equation, we will find value at each state of the given environment. We will start from the block, which is next to the target block. For 1st block: V(s3) = max [R(s,a) + γV(s`)], here V(s')= 0 because there is no further state to move. V(s3)= max[R(s,a)]=> V(s3)= max[1]=> V(s3)= 1. For 2nd block: V(s2) = max [R(s,a) + γV(s`)], here γ= 0.9(lets), V(s')= 1, and R(s, a)= 0, because there is no reward at this state. V(s2)= max[0.9(1)]=> V(s)= max[0.9]=> V(s2) =0.9 For 3rd block: V(s1) = max [R(s,a) + γV(s`)], here γ= 0.9(lets), V(s')= 0.9, and R(s, a)= 0, because there is no reward at this state also. V(s1)= max[0.9(0.9)]=> V(s3)= max[0.81]=> V(s1) =0.81 For 4th block: V(s5) = max [R(s,a) + γV(s`)], here γ= 0.9(lets), V(s')= 0.81, and R(s, a)= 0, because there is no reward at this state also. V(s5)= max[0.9(0.81)]=> V(s5)= max[0.81]=> V(s5) =0.73 For 5th block: V(s9) = max [R(s,a) + γV(s`)], here γ= 0.9(lets), V(s')= 0.73, and R(s, a)= 0, because there is no reward at this state also. V(s9)= max[0.9(0.73)]=> V(s4)= max[0.81]=> V(s4) =0.66 Consider the below image: 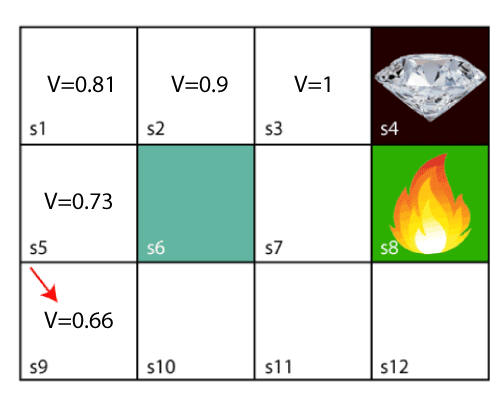
Now, we will move further to the 6th block, and here agent may change the route because it always tries to find the optimal path. So now, let's consider from the block next to the fire pit. 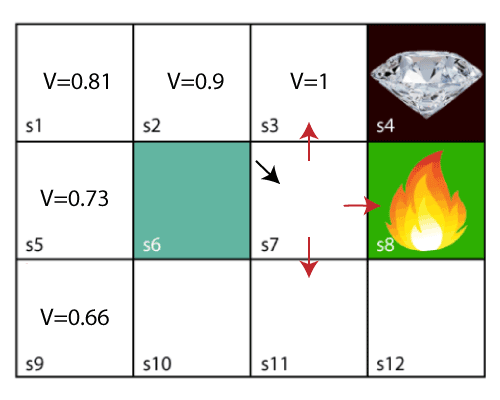
Now, the agent has three options to move; if he moves to the blue box, then he will feel a bump if he moves to the fire pit, then he will get the -1 reward. But here we are taking only positive rewards, so for this, he will move to upwards only. The complete block values will be calculated using this formula. Consider the below image: 
Types of Reinforcement learningThere are mainly two types of reinforcement learning, which are:
Positive Reinforcement: The positive reinforcement learning means adding something to increase the tendency that expected behavior would occur again. It impacts positively on the behavior of the agent and increases the strength of the behavior. This type of reinforcement can sustain the changes for a long time, but too much positive reinforcement may lead to an overload of states that can reduce the consequences. Negative Reinforcement: The negative reinforcement learning is opposite to the positive reinforcement as it increases the tendency that the specific behavior will occur again by avoiding the negative condition. It can be more effective than the positive reinforcement depending on situation and behavior, but it provides reinforcement only to meet minimum behavior. How to represent the agent state?We can represent the agent state using the Markov State that contains all the required information from the history. The State St is Markov state if it follows the given condition: P[St+1 | St ] = P[St +1 | S1,......, St] The Markov state follows the Markov property, which says that the future is independent of the past and can only be defined with the present. The RL works on fully observable environments, where the agent can observe the environment and act for the new state. The complete process is known as Markov Decision process, which is explained below: Markov Decision ProcessMarkov Decision Process or MDP, is used to formalize the reinforcement learning problems. If the environment is completely observable, then its dynamic can be modeled as a Markov Process. In MDP, the agent constantly interacts with the environment and performs actions; at each action, the environment responds and generates a new state. 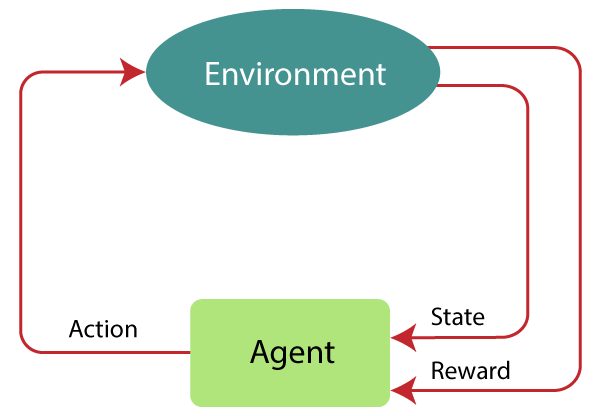
MDP is used to describe the environment for the RL, and almost all the RL problem can be formalized using MDP. MDP contains a tuple of four elements (S, A, Pa, Ra):
MDP uses Markov property, and to better understand the MDP, we need to learn about it. Markov Property:It says that "If the agent is present in the current state S1, performs an action a1 and move to the state s2, then the state transition from s1 to s2 only depends on the current state and future action and states do not depend on past actions, rewards, or states." Or, in other words, as per Markov Property, the current state transition does not depend on any past action or state. Hence, MDP is an RL problem that satisfies the Markov property. Such as in a Chess game, the players only focus on the current state and do not need to remember past actions or states. Finite MDP: A finite MDP is when there are finite states, finite rewards, and finite actions. In RL, we consider only the finite MDP. Markov Process:Markov Process is a memoryless process with a sequence of random states S1, S2, ....., St that uses the Markov Property. Markov process is also known as Markov chain, which is a tuple (S, P) on state S and transition function P. These two components (S and P) can define the dynamics of the system. Reinforcement Learning AlgorithmsReinforcement learning algorithms are mainly used in AI applications and gaming applications. The main used algorithms are:
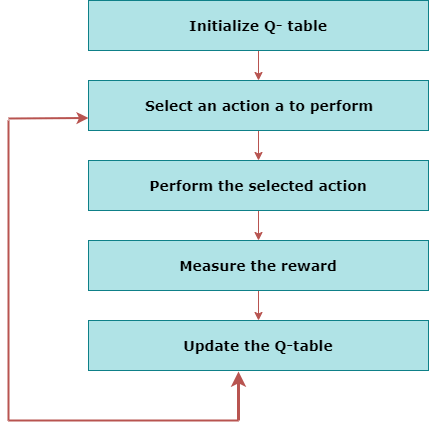
Now, we will expand the Q-learning. Q-Learning Explanation:

In the equation, we have various components, including reward, discount factor (γ), probability, and end states s'. But there is no any Q-value is given so first consider the below image: 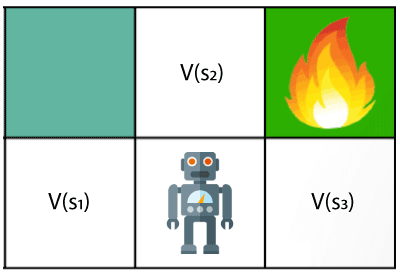
In the above image, we can see there is an agent who has three values options, V(s1), V(s2), V(s3). As this is MDP, so agent only cares for the current state and the future state. The agent can go to any direction (Up, Left, or Right), so he needs to decide where to go for the optimal path. Here agent will take a move as per probability bases and changes the state. But if we want some exact moves, so for this, we need to make some changes in terms of Q-value. Consider the below image: 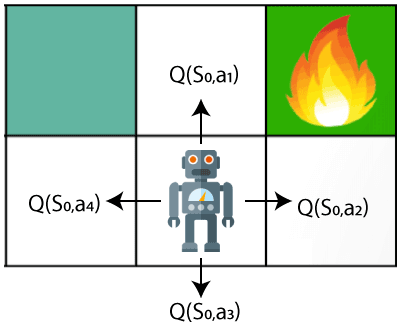
Q- represents the quality of the actions at each state. So instead of using a value at each state, we will use a pair of state and action, i.e., Q(s, a). Q-value specifies that which action is more lubricative than others, and according to the best Q-value, the agent takes his next move. The Bellman equation can be used for deriving the Q-value. To perform any action, the agent will get a reward R(s, a), and also he will end up on a certain state, so the Q -value equation will be: 
Hence, we can say that, V(s) = max [Q(s, a)] 
The above formula is used to estimate the Q-values in Q-Learning. What is 'Q' in Q-learning? The Q stands for quality in Q-learning, which means it specifies the quality of an action taken by the agent. Q-table:A Q-table or matrix is created while performing the Q-learning. The table follows the state and action pair, i.e., [s, a], and initializes the values to zero. After each action, the table is updated, and the q-values are stored within the table. The RL agent uses this Q-table as a reference table to select the best action based on the q-values. Difference between Reinforcement Learning and Supervised LearningThe Reinforcement Learning and Supervised Learning both are the part of machine learning, but both types of learnings are far opposite to each other. The RL agents interact with the environment, explore it, take action, and get rewarded. Whereas supervised learning algorithms learn from the labeled dataset and, on the basis of the training, predict the output. The difference table between RL and Supervised learning is given below:
Reinforcement Learning Applications
Conclusion:From the above discussion, we can say that Reinforcement Learning is one of the most interesting and useful parts of Machine learning. In RL, the agent explores the environment by exploring it without any human intervention. It is the main learning algorithm that is used in Artificial Intelligence. But there are some cases where it should not be used, such as if you have enough data to solve the problem, then other ML algorithms can be used more efficiently. The main issue with the RL algorithm is that some of the parameters may affect the speed of the learning, such as delayed feedback. |
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








