| |

DTMF based Mobile Controlled RobotIn general, wireless-controlled robots use RF circuits, which have the drawbacks of limited frequency range, limited working range and the limited control. Use of mobile phone in robot control can overcome these limitations. It provides an advantage of working range as large as coverage area of the service provider, robust control, no interference with other controllers. WorkingIn DTMF based mobile/cellphone controlled robot the AVR ATmega16 microcontroller is used with keypad as the input device to drive robot in various directions. In this project two mobiles are used, one will be connected with the DTMF circuit and another will be used for calling the mobile attached with DTMF circuit. The ATmega16 microcontroller read the 4-bit output signal of DTMF decoder and it will process the signal for determining which key of mobile keypad is pressed, the ATmega16 microcontroller send the control signal to the DC motor driver (L293D) of the robot for driving the robot in desired direction. The table showing different control keys with their equivalent robot direction is:-
Block Diagram: 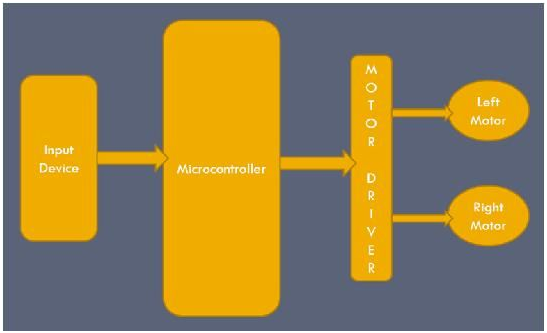
Consider the table showing Dual Tone Multiple Frequency (DTMF) for different keys of keypad are:- 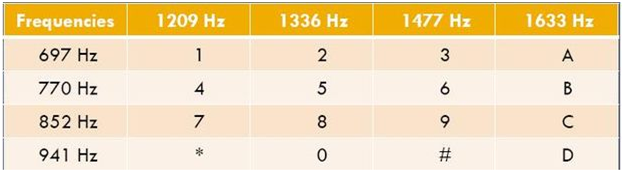
Hardware Required:
Software Required
Circuit Diagram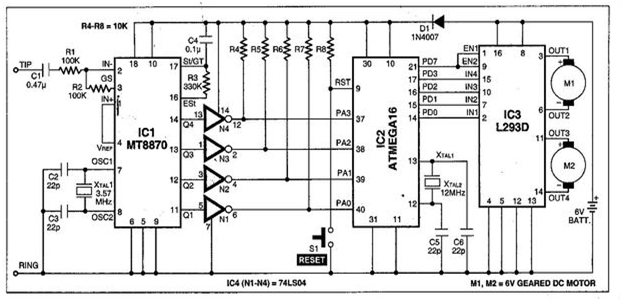
Construction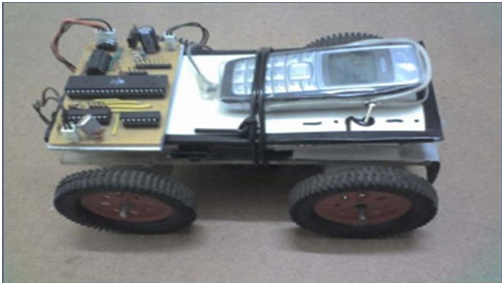
Source Code: The screenshot of source code used in hand gesture control robot using BASCOM-AVR Integrated Development Environment (IDE) is shown below: 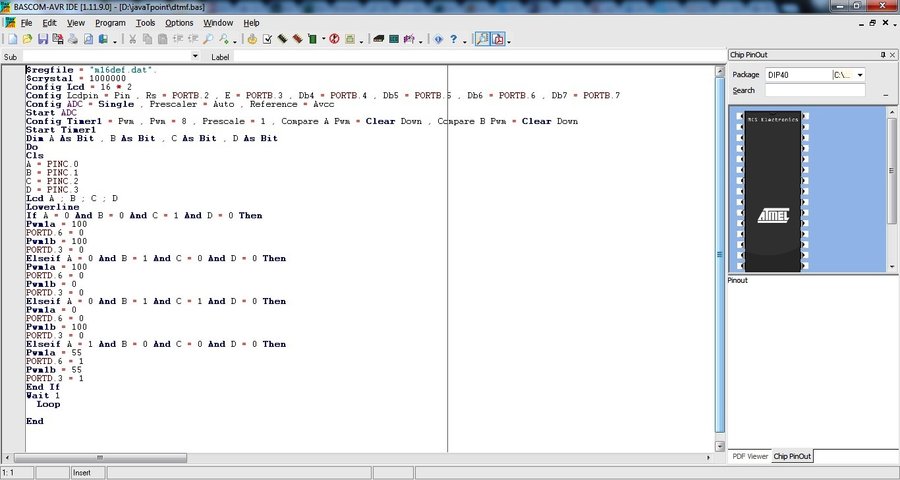
Next TopicInterview Question
|
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








