| |

Hand Gesture Controlled RobotIn many application of controlling robots, it is quite difficult and complicated when there comes a part of controlling robot with remote or many different switches. In industrial robotics, medical application for surgery, military application in this field it is quite complicated to control the robot or machine with switches or remote. Therefore a new concept is introduced to control a machine with the movement of hand which will simultaneously control the position and movement of robot. WorkingFor designing of an accelerometer based hand gesture controlled robot the AVR ATmega16 microcontroller is used. In this we use our hand gestures as input signals for driving the robot in various direction and the direction of movement of the robot is display on 16X2 alphanumeric LCD. According to hand gesture, the ATmega16 microcontroller will send a required signal to DC motor driver (L293D) of the robot for driving the robot in desired direction. The control hand gestures for the robot are right tilt, left tilt, forward tilt, backward tilt and no tilt to drive the robot in right, left, forward, backward direction and to stop it respectively. Now, tilt your hand in various directions and drive the robot as you want.
Hardware Required
Software Required
Accelerometer SensorAcceleration sensor is used for measuring acceleration and tilt. An accelerometer is a device used for measuring acceleration. The two kinds of forces which affect an accelerometer are:
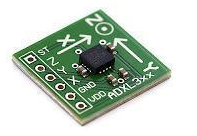
Accelerometer is comes in different configuration. Always use the one which is most appropriate for your robot. Some factors need to be considered before selecting accelerometer is:-
Consider the schematic diagram of basic accelerometer: 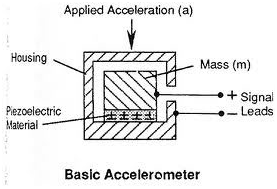
In accelerometer sensor there are 6 pin available in Integrated Circuit (IC):-
Transmitter Block DiagramConsider the block diagram of transmitter circuit: 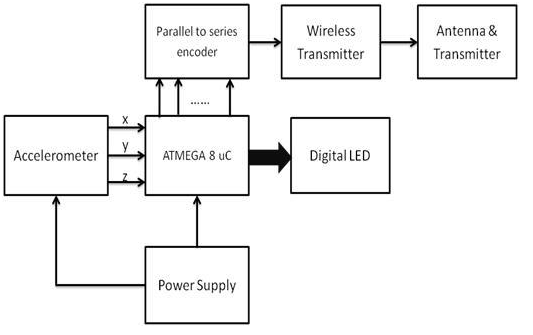
Receiver Block DiagramConsider the block diagram of receiver circuit: 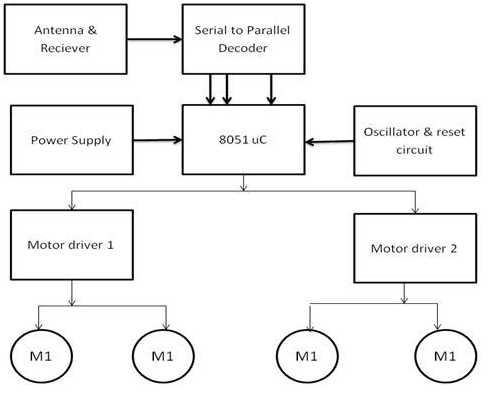
Construction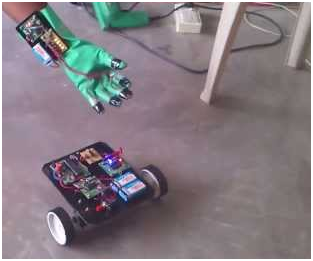
Source Code: The screenshot of source code used in hand gesture control robot using BASCOM-AVR Integrated Development Environment (IDE) is shown below: 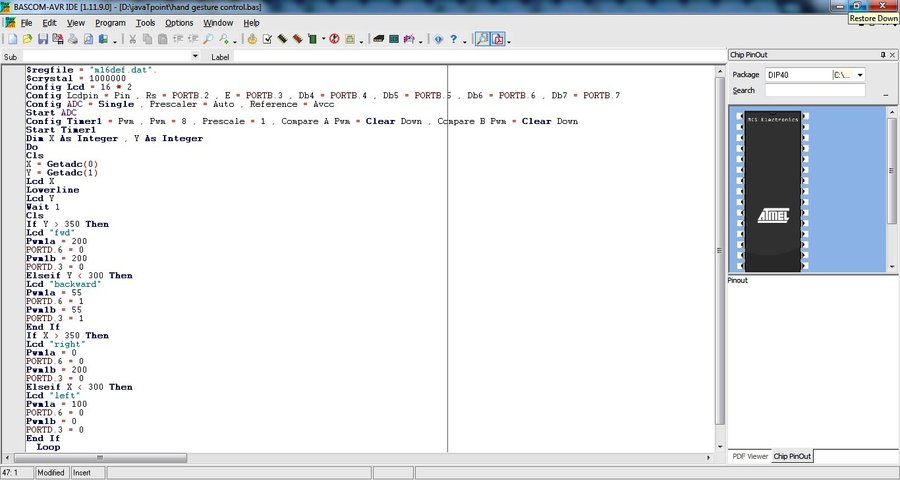
Next TopicDTMF based Mobile Controlled Robot
|
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








