| |

Types of Robot SensorsThere are different type of sensors are available to choose from and the characteristics of sensors are used for determining the type of sensor to be used for particular application. 
1) Light SensorLight sensor is a transducer used for detecting light and creates a voltage difference equivalent to the light intensity fall on a light sensor. The two main light sensors used in robots are Photovoltaic cells and Photo resistor. Other kind of light sensors like phototransistors, phototubes are rarely used. The type of light sensors used in robotics are: Photo resistor - It is a type of resistor used for detecting the light. In photo resistor resistance varies with change in light intensity. The light falls on photo resistor is inversely proportional to the resistance of the photo resistor. In general photo resistor is also called as Light Dependent Resistor (LDR). Consider the circuit diagram of Photo resistor sensor: 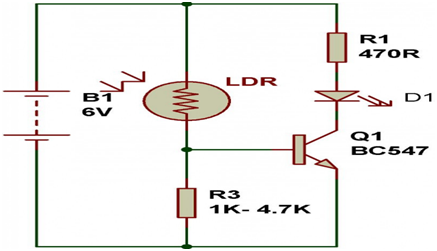
Photovoltaic Cells - Photovoltaic cells are energy conversion device used to convert solar radiation into electrical electric energy. It is used if we are planning to build a solar robot. Individually photovoltaic cells are considered as an energy source, an implementation combined with capacitors and transistors can convert this into a sensor. Consider the circuit diagram of photovoltaic cell is, 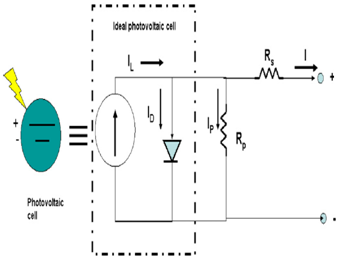
2) Proximity SensorProximity sensor can detect the presence of nearby object without any physical contact. The working of a proximity sensor is simple. In proximity sensor transmitter transmits an electromagnetic radiation and receiver receives and analyzes the return signal for interruptions. Therefore the amount of light receiver receives by surrounding can be used for detecting the presence of nearby object. Consider the types of proximity sensors used in robotics are:- Infrared (IR) Transceivers - In IR sensor LED transmit the beam of IR light and if it find an obstacle then the light is reflected back which is captured by an IR receiver. Consider the PCB board layout of IR Transceiver circuit: 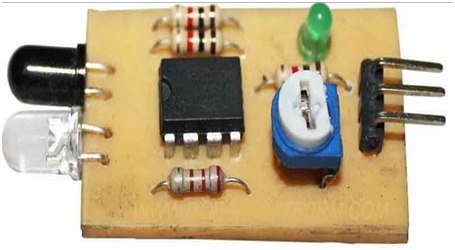
Ultrasonic Sensor - In ultrasonic sensors high frequency sound waves is generated by transmitter, the received echo pulse suggests an object interruption. In general ultrasonic sensors are used for distance measurement in robotic system. Consider the interfacing of ultrasonic sensor with Microcontroller unit: 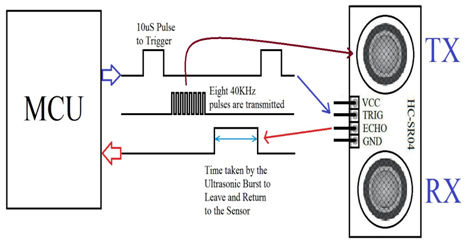
3) Sound SensorSound sensors are generally a microphone used to detect sound and return a voltage equivalent to the sound level. Using sound sensor a simple robot can be designed to navigate based on the sound receives. Implementation of sound sensors is not easy as light sensors because it generates a very small voltage difference which will be amplified to generate measurable voltage change. Consider the sound sensor based switching circuit: 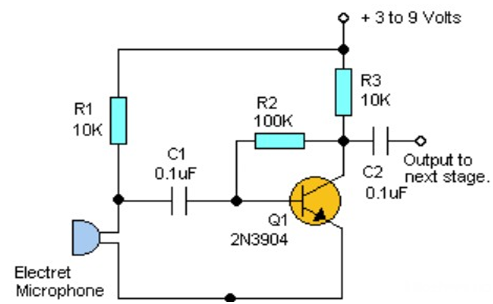
4) Temperature SensorTemperature sensors are used for sensing the change in temperature of the surrounding. It is based on the principle of change in voltage difference for a change in temperature this change in voltage will provide the equivalent temperature value of the surrounding. Few generally used temperature sensors IC?s are TMP35, TMP37, LM34, LM35, etc. Consider the temperature sensor pin diagram description is, 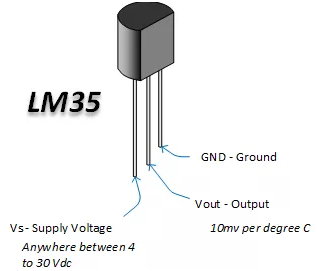
5) Acceleration SensorAcceleration sensor is used for measuring acceleration and tilt. An accelerometer is a device used for measuring acceleration. The two kinds of forces which affect an accelerometer is:-
Accelerometer is comes in different configuration. Always use the one which is most appropriate for your robot. Some factors need to be considered before selecting accelerometer is:
Consider the schematic diagram of basic accelerometer: 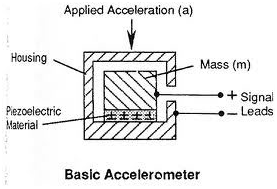
|
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








