| |

Hidden Surface Removal
Types of hidden surface detection algorithms
Object space methods: In this method, various parts of objects are compared. After comparison visible, invisible or hardly visible surface is determined. These methods generally decide visible surface. In the wireframe model, these are used to determine a visible line. So these algorithms are line based instead of surface based. Method proceeds by determination of parts of an object whose view is obstructed by other object and draws these parts in the same color. Image space methods: Here positions of various pixels are determined. It is used to locate the visible surface instead of a visible line. Each point is detected for its visibility. If a point is visible, then the pixel is on, otherwise off. So the object close to the viewer that is pierced by a projector through a pixel is determined. That pixel is drawn is appropriate color. These methods are also called a Visible Surface Determination. The implementation of these methods on a computer requires a lot of processing time and processing power of the computer. The image space method requires more computations. Each object is defined clearly. Visibility of each object surface is also determined. Differentiate between Object space and Image space method
Similarity of object and Image space methodIn both method sorting is used a depth comparison of individual lines, surfaces are objected to their distances from the view plane. 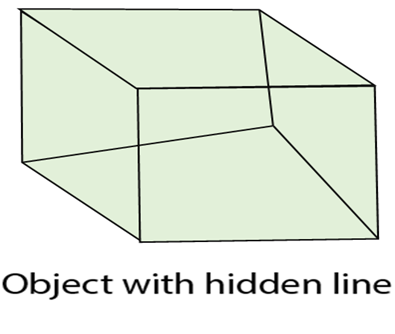 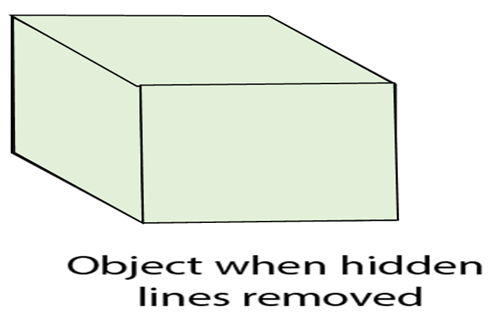
Considerations for selecting or designing hidden surface algorithms: Following three considerations are taken:
Sorting: All surfaces are sorted in two classes, i.e., visible and invisible. Pixels are colored accordingly. Several sorting algorithms are available i.e.
Different sorting algorithms are applied to different hidden surface algorithms. Sorting of objects is done using x and y, z co-ordinates. Mostly z coordinate is used for sorting. The efficiency of sorting algorithm affects the hidden surface removal algorithm. For sorting complex scenes or hundreds of polygons complex sorts are used, i.e., quick sort, tree sort, radix sort. For simple objects selection, insertion, bubble sort is used. CoherenceIt is used to take advantage of the constant value of the surface of the scene. It is based on how much regularity exists in the scene. When we moved from one polygon of one object to another polygon of same object color and shearing will remain unchanged. Types of Coherence
1. Edge coherence: The visibility of edge changes when it crosses another edge or it also penetrates a visible edge. 2. Object coherence: Each object is considered separate from others. In object, coherence comparison is done using an object instead of edge or vertex. If A object is farther from object B, then there is no need to compare edges and faces. 3. Face coherence: In this faces or polygons which are generally small compared with the size of the image. 4. Area coherence: It is used to group of pixels cover by same visible face. 5. Depth coherence: Location of various polygons has separated a basis of depth. Depth of surface at one point is calculated, the depth of points on rest of the surface can often be determined by a simple difference equation. 6. Scan line coherence: The object is scanned using one scan line then using the second scan line. The intercept of the first line. 7. Frame coherence: It is used for animated objects. It is used when there is little change in image from one frame to another. 8. Implied edge coherence: If a face penetrates in another, line of intersection can be determined from two points of intersection. Algorithms used for hidden line surface detection
Next TopicBack Face Removal Algorithm
|
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








