| |

Collision Detection in CSMA/CDCSMA/CD (Carrier Sense Multiple Access/ Collision Detection) is an early Ethernet technology/LAN media access control technique that was commonly utilised when there was a shared bus topology, and coaxial cables were used to link each node (computer) to the network. Ethernet is now a full duplex; topologies are star (linked by switch or router) or point-to-point (direct connection). CSMA/CD is not used as a result, but they remain accessible. Think about a situation where 'n' stations are connected to a link and are all waiting to send data across that channel. All "n" stations would then want to connect to the link or channel to send their own data. When multiple stations are simultaneously transmitting data, a problem occurs. The data from many stations will collide in this situation. One such method is CSMA/CD, where the various stations that adhere to this protocol agree on certain terms and collision detection techniques for efficient transmission. In order to prevent data from being corrupted as it travels to its destination, this protocol determines which station will broadcast when. How does CSMA/CD function?Step 1: Verify that the sender is prepared to send data packets. Step 2: Verify that the gearbox link is in idle mode. The sender must continuously monitor the state of the transmission link or medium. It regularly monitors broadcasts coming from other nodes to do this. On the link, the sender sends fake data. If it doesn't receive any collision signals, the link is currently not in use. The data is sent when the carrier is perceived to be free and there are no collisions. Otherwise, it does not send data. Step 3: Send the data and look for collisions. Data from the sender is sent through the link. There is no 'acknowledgement' system in CSMA/CD. Through collision signals, it verifies successful and unsuccessful transmissions. Transmission is halted if a node receives a collision signal while transmission is in progress. The station then sends a jamming signal onto the link and waits a predetermined amount before sending the frame again. It tries to send the data again after some arbitrary interval and goes through the same procedure as before. Step 4: The sender completes its frame transmission and resets the counters if no collisions are found during propagation. How can a station determine whether its data collide? 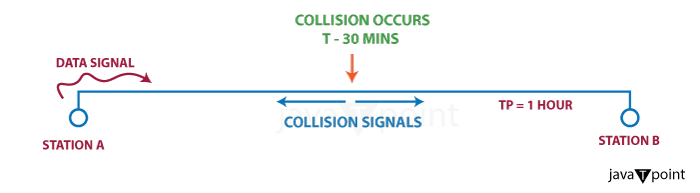
Take into account the scenario above. A and B stations. Propagation Time: Tp = 1 hour (Signal travels from point A to point B in 1 hr). Following the collision, a collision signal is created and sent to stations A and B to alert them. Since the collision occurred in the middle, the collision signal also takes 30 minutes to reach A and B. All the stations on that link can hear this collision signal. How can we be certain the data that collided was from our station? Transmission time (Tt) > Propagation time (Tp) [rough bound] applies in this case. This is because we want to be certain that some of the bits have arrived at their destination before we broadcast the final bit of our data from our station. This guarantees that the link won't be overloaded and that collisions won't happen. However, the binding is loose above. We have not given the collision signal when it needs to return to us. Think about the worst-case situation when doing this. 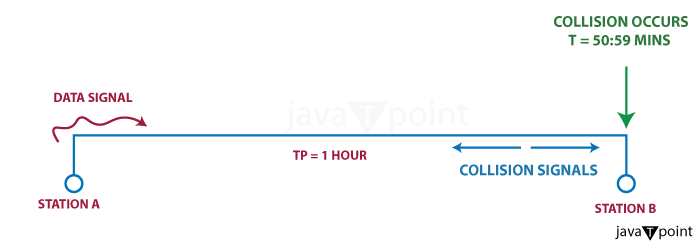
Take into account the system once more. The data collides at this point shortly before it reaches B. Once more, it takes 59:59 minutes for the collision signal to reach A. As a result, A receives the collision information after 2 * Tp, or roughly after 2 hours. This is the quickest a system can determine whether a collision involved its own data. What should the minimum size of the transmission packet be? When we do not have such long packets, padding is helpful. To meet the aforementioned requirement, we can pad our data with extra characters at the conclusion. The following characteristics are used in CSMA/CD collision detection:
Benefits of CSMA/CD
Negative aspects of CSMA/CD
Next TopicIpv4 Header in Computer Networks
|
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








