| |

Representing: Shortest PathGiven a graph G = (V, E), we maintain for each vertex v ∈ V a predecessor π [v] that is either another vertex or NIL. During the execution of shortest paths algorithms, however, the π values need not indicate shortest paths. As in breadth-first search, we shall be interested in the predecessor subgraph Gn= (Vn,En) induced by the value π. Here again, we define the vertex set Vπ, to be the set of vertices of G with non - NIL predecessors, plus the source s:
Vπ= {v ∈ V: π [v] ≠ NIL} ∪ {s} }
The directed edge set EΠ is the set of edges induced by the Π values for vertices in VΠ:
EΠ= {(Π[v], v) ∈ E: v ∈ VΠ - {s}}
A shortest - paths tree rooted at s is a directed subgraph G = (V' E'), where V'∈ V andE'∈E, such that
Shortest paths are not naturally unique, and neither is shortest - paths trees. Properties of Shortest Path:1. Optimal substructure property: All subpaths of shortest paths are shortest paths. 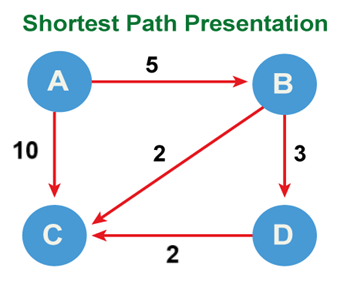 Let P1 be x - y sub path of shortest s - v path. Let P2 be any x - y path. Then cost of P1≤ cost of P2,otherwise P not shortest s - v path. 2. Triangle inequality: Let d (v, w) be the length of shortest path from v to w. Then,  3. Upper-bound property: We always have d[v] ≥ δ(s, v) for all vertices v ∈ V, and once d[v] conclude the value δ(s, v), it never changes. 4. No-path property: If there is no path from s to v, then we regularly have d[v] = δ(s, v) = ∞. 5. Convergence property: If s->u->v is a shortest path in G for some u, v ∈ V, and if d[u] = δ(s, u) at any time prior to relaxing edge (u, v), then d[v] = δ(s, v) at all times thereafter.
Next TopicRelaxation
|
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








