| |

Image Edge Detection Operators in Digital Image Processing MATLABIntroduction:An essential step in digital image processing is edge detection, which seeks to locate the borders or edges of objects in an image. It is an essential step in many computer vision and image analysis tasks, including object recognition, segmentation, and feature extraction. To complete this objective, several edge detection operators or algorithms have been created over time, each with advantages and disadvantages. In this post, we'll look at a few edge detection techniques frequently employed in digital image processing.
Let's explore the three main categories of edges:
Horizontal Edges: In an image, a horizontal edge is created when there is a sudden change in hue or intensity. These edges usually denote transitions or borders between regions or primarily horizontal things. Horizontal Edges Examples:
Edge detection algorithms like the Sobel or Prewitt operators, intended to accentuate horizontal direction changes, are frequently used to identify horizontal edges. Vertical Edges: Conversely, a vertical edge is a sudden change in hue or intensity within an image. These edges frequently indicate these borders or transitions between regions or objects with mostly vertical properties. Example of vertical edges:
Edge detection algorithms that detect changes in the vertical direction, similar to the horizontal edges, can be used to identify vertical edges. Diagonal Edges: Diagonal edges show shifts in hue or intensity that aren't strictly horizontal or vertical. Although less frequent, these edges can be significant in some situations, such as photos with oblique objects or intricate textures. Examples of Diagonal Edges
It can be trickier to find diagonal edges than horizontal or vertical ones. It might call for more advanced edge detection methods, such as the Canny edge detector or applying Gabor filters, considering various directions or orientations. Edge Detection:Edge detection enables digital image processing systems to highlight areas of interest, facilitating analysis and comprehension of image content. Edge detection assists in identifying object borders, textures, and features by highlighting major changes in gray levels or intensity. This technique enables various applications to extract important data from photos effectively.
The significance and uses of it are briefly explained as follows: Pattern recognition: Identification and classification of objects or patterns within an image are the objectives of pattern recognition. Thanks to edge detection, finding the edges of items makes it simpler to tell one object from another. Image Morphology: Manipulating an image's shapes and structures using techniques like erosion and dilatation is known as image morphology. Feature Extraction: For image analysis tasks, including object tracking, face recognition, and content-based picture retrieval, relevant characteristics must be extracted from an image. Segmentation: Segmenting an image involves splitting it into useful areas or items. This procedure begins with edge detection, which locates probable borders between objects or locations. Data Reduction: Edge detection has the potential to minimize the quantity of data in an image while still maintaining important structural information. This is one of its advantages. Subsequent processes can concentrate on regions of interest identified by the discovered edges rather than processing the entire image. This improves the effectiveness of image transmission and storage and speeds up processing. 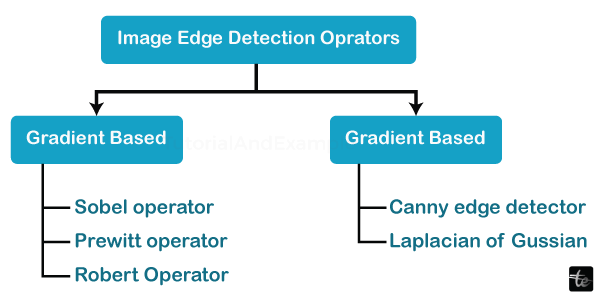
Based on their basic ideas and methods, edge detection operators can be broadly divided into two categories: Operators for Gradient-Based Edge Detection:Sobel operator: calculates the gradient approximation of the intensity function of an image for edge detection. The vertical and horizontal derivative approximations are computed using convolution with two kernels, one for detecting vertical edges and another for horizontal edges. Prewitt Operator: The Prewitt operator, like the Sobel operator, uses convolution with particular kernels to identify an image's vertical and horizontal edges. Robert operator: Another operator that uses gradients to determine edge gradients is the Robert operator, which adds up the squares of differences between diagonally adjacent pixels in the image. Operators for Gaussian-Based Edge Detection:Canny edge detector: This popular edge detection method combines gradient-based edge detection and Gaussian smoothing. Laplacian of Gaussian operator (LoG): This is a Gaussian-based operator that smoothes the image with a Gaussian function before computing the Laplacian to look for edges. It can detect edges at various scales and is sensitive to rapid intensity changes.
Sobel Operator:The Sobel Operator is a popular gradient-based edge detection method in digital image processing. It is used to locate edges inside an image by emphasizing areas where the intensity varies quickly. It is named after its creator, Irwin Sobel. The vertical (along the y-axis) and horizontal (along the x-axis) are the main directions in which the Sobel Operator concentrates on finding edges. This is accomplished by computing the intensity function of the image's gradient approximation. The Sobel Operator is Explained in detail below: Representation in Mathematics:The Sobel Operator convolves the picture with two 3x3 convolution kernels or masks: Sobel Y for horizontal edges and Sobel X for vertical edges. The following describes these kernels: Vertical Edge Detection Sobel X: M_x = -1 0 1 -2 0 2 -1 0 1 Sobel Y (Horizontal Edge Detection): M_y = -1 -2 -1
Operation: Convolution: The Sobel Operator conducts convolution between these kernels and the input picture. This convolution operation is applied to each image pixel to calculate the approximate vertical and horizontal derivatives. Calculating the magnitude of a gradient involves creating two gradient pictures, one for vertical changes (Sobel Y) and one for horizontal changes (Sobel X), after convolution. These pictures show how quickly the intensity shifts in each direction. Combining Magnitudes: The Sobel Operator commonly combines the magnitude data from the vertical and horizontal gradients to produce a single gradient image Advantages: Simplicity: The Sobel Operator is rather easy to comprehend and use. Computing Effectiveness: It is computationally effective and only requires simple arithmetic calculations. Sobel offers directional information about edges, making identifying edges with a certain orientation practical. It is efficient at identifying continuous, smooth edges. Limitations:
A fundamental and popular technique for edge detection is the Sobel Operator. It offers a simple method for locating edges in digital images by computing gradient approximations. When selecting an edge detection technique for a particular task, it is important to consider its susceptibility to noise and limits in detecting diagonal edges, even though it is useful for many applications. Prewitt Operator:Another gradient-based edge detection method used in digital image processing to find edges in an image is the Prewitt Operator. The Prewitt Operator, like the Sobel Operator, draws attention to areas where the intensity or color changes dramatically, signaling the existence of edges. It is incredibly good at distinguishing vertical and horizontal borders in photographs and is named for its creator, Judith M. S. Prewitt. The Prewitt Operator is explained in full below: Representation in Mathematics: With the Prewitt Operator, the image is convolved using two 3x3 convolution kernels or masks, one for identifying edges on the horizontal (Prewitt X) and one on the vertical (Prewitt Y). The following describes these kernels: Horizontal edge detection using Prewitt X: M_x = [-1 0 1 -1 0 1 -1 0 1] Prewitt Y (Vertical Edge Detection): M_y = [-1 -1 -1
1 1 1] Operation: Convolution: The input image and these kernels are convolved by the Prewitt Operator. This convolution procedure calculates the vertical and horizontal derivative approximations for each image pixel. Gradient Magnitude Calculation: Two gradient pictures are created during convolution, one for identifying vertical changes (Prewitt Y) and the other for identifying horizontal changes (Prewitt X). These pictures show how quickly the intensity shifts in each direction. Combining Magnitudes: To produce a single gradient magnitude image, the Prewitt Operator typically combines the magnitude data from the vertical and horizontal gradients. Like the Sobel Operator, the square root of a sum of the square gradient values in the vertical and horizontal directions is used to calculate the gradient magnitude at each pixel. Advantages:
Limitations: Fixed Coefficients: In contrast to several other edge detection methods, the Prewitt Operator's coefficients are fixed and cannot be modified in response to the unique properties of an image. Diagonal Edges: It might be less effective in identifying diagonal or other types of edges. The Prewitt Operator can be sensitive to image noise, resulting in erroneous edge detections. Robert Operator:In digital image processing, the Robert Operator, the Roberts Cross Operator, is a straightforward gradient-based edge detection method for locating edges in an image.
The Robert Operator is explained in detail below: Representation in Mathematics: The Robert Operator employs two 2x2 convolution kernels or masks, Robert X and Robert Y, which are used to detect diagonal edges from top-left to bottom-right and from top-right to top-left, respectively: Robert X (Top-left to Bottom-right Diagonal Edge Detection): M_x = [1 0 0 -1] Robert Y (Diagonal Edge Detection - Top-right to Bottom-left): M_y = [0 1 -1 0] Operation: Convolution: The Robert Operator applies convolution to the input picture and these kernels. This convolution procedure calculates The diagonal derivative estimates for each image pixel. Gradient Magnitude Calculation: Following convolution, two gradient pictures are created, one for identifying diagonal edges from top-left to bottom-right (Robert X) and the other for identifying diagonal edges from top-right to bottom-left (Robert Y). Combining Magnitudes: Typically, the Robert Operator creates a single gradient magnitude image by combining the magnitude data from both diagonal gradients. Advantages: The Robert Operator is efficient in applications where diagonal features dominate since it is specifically built to detect diagonal edges. Simplicity: The Robert Operator is easy to use, just like other fundamental gradient-based operators. Preservation of Diagonal Edges: Due to its design, it effectively preserves diagonal edges. Limitations: The Robert Operator can be sensitive to image noise, resulting in erroneous edge detections. Limited to Diagonal Edges: It may be less adaptable than other edge detection techniques and could be more effective at detecting vertical or horizontal edges.
Laplacian of Gaussian (LoG):The Laplacian of Gaussian (LoG) operator, sometimes called the Marr-Hildreth operator, is a common edge detection method in digital image processing. It combines the Laplacian operator and Gaussian smoothing, two crucial ideas in image processing. The LoG operator highlights areas where the intensity or color abruptly changes to detect edges in a picture.
A thorough explanation of the Marr-Hildreth Operator (LoG) is given below: Representation in Mathematics:The two primary phases of the Marr-Hildreth Operator are as follows: Gaussian Smoothing: The input image is first convolved with a Gaussian kernel to lessen noise and highlight progressive intensity changes. Here, the smoothing of the image is controlled by the standard deviation of a Gaussian distribution, represented by the symbol. A higher value produces more robust smoothing. Laplacian Operation: The image is smoothed using a Gaussian kernel, and then the Laplacian operator is used to determine the image's Laplacian. The sum of the second derivatives concerning a picture's spatial coordinates (x and y) is used to determine its Laplacian. The image smoothed out in the first stage is G(x,y). Operation: The input image is convolved using a Gaussian kernel with a specified value to produce a smoothed, noise-reduced image. Laplacian Operation: The smoothed image is subjected to the Laplacian operator to produce the Laplacian of Gaussian (LoG) image. Advantages:
Limitations: Sensitivity to Noise: The LoG operator, like other edge detection techniques, is susceptible to noise, which could result in erroneous detections or noisy replies. Localization mistakes can be made by the LoG operator along curved edges, which could compromise the precision of edge detection. Complex Computation: Compared to other edge detection techniques, the LoG operator requires more computer work due to the convolution with a Gaussian kernel and subsequent Laplacian operation. Canny Operator:A highly acclaimed edge detection method in digital image processing is the Canny Edge Detector, often known as the Canny Operator. It was created by John F. Canny in 1986 and is still a preferred option because of its precision in detecting edges, reduction of noise, and generation of thin, well-defined edge outlines. The Canny Operator uses a multi-step procedure to detect edges precisely.
The Canny Operator is explained in detail below: The method for detecting Canny Edges The Canny Edge Detector has numerous stages, including: Gaussian Smoothing: In the first step, the input image must undergo Gaussian smoothing. The image noise is reduced by Gaussian smoothing, but the important edges are kept. The image is convolves with a Gaussian kernel. The amount of smoothing is influenced by the kernel size selection (defined by the standard deviation). This process results in a blurred image with less noise. Calculating a gradient: To assess the size and direction of intensity changes, the gradient of the smoothed image is determined at this stage. The gradient of the image in a x and y directions is frequently determined using the Sobel operator. Each pixel's gradient magnitude is calculated by Combining the x and y gradients while applying the Pythagorean theorem. Insufficient Suppression:Non-maximum suppression is used to produce edges that are narrow and well-defined.
Hysteresis-Based Edge Tracking:Hysteresis-based edge tracking makes it easier to join edge segments and eliminate weak, erroneous edges.
Edge tracking is used to follow prospective weak edges and include them in the edge map if they connect to strong edges. Advantages:
Limitations: Complex Computation: The Canny Operator requires more computation than simpler edge detection methods because it goes through multiple phases. Parameter tuning: For the best results, it may be necessary to experiment with different values for the high and low thresholds and the size of the Gaussian kernel. Sensitive to Thresholds: The Canny Operator's performance depends heavily on selecting appropriate threshold values, which can be difficult. Image Edge Detection Applications in the Real World:A fundamental method in digital image processing, edge detection has numerous practical uses in various industries. Here are some thorough illustrations of edge detection in action:
Edge detection is a satellite and aerial imaging technique to discover and recognize objects or structures. This is crucial for jobs like urban planning, disaster relief, and environmental monitoring.
|
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








