| |

Islands in a graph using BFSIntroductionGraphs are basic data structures that show an arrangement of edges and nodes. They are used in many different domains, such as computer networks and social networks. Finding islands within a graph is an intriguing topic in graph theory. When discussing graphs, islands are frequently referred to as connected components or subgraphs in which every node can be reached from every other node. A graph traversal algorithm called Breadth-First Search investigates every vertex in a graph level by level. Before going on to the next level of vertices, BFS investigates its neighbors starting from a specified source vertex. Because of this feature, BFS is appropriate for tasks such as determining the shortest path between two nodes or identifying linked components within a network. Imagine a situation where a network of connected nodes is represented as a graph. In this context, an island is a collection of nodes that are linked to one another but not to nodes outside the group. In such a graph, we may use BFS to explore and mark related components in order to determine the number of islands. 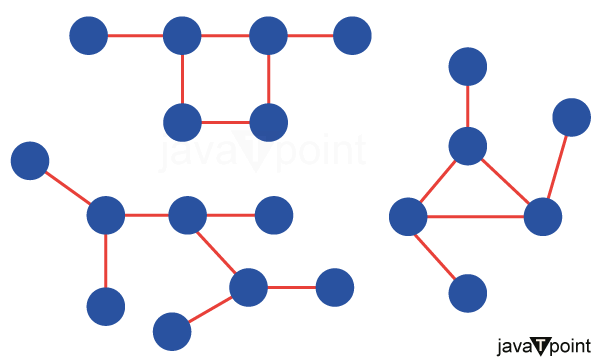
Code Output: 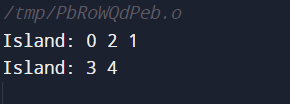
Code Explanation Graph Illustration
Node Creation
Graph Development
Edge Addition
Breadth-First Search (BFS)
Main Function
Identification of the Island
Time and Space Complexity The Breadth-First Search (BFS) algorithm affects the time complexity of the given C code. In the worst-case scenario, when all vertices and edges are explored, the time complexity is O(V + E), where V is the number of vertices and E is the number of edges. This is because BFS traverses each vertex and edge once. In the code's specific example, where the number of vertices is denoted by V and the number of edges is denoted by E, the time complexity can be regarded as O(V + E). The data structures that are utilized to implement BFS and describe the graph largely dictate the space complexity. O(V + E) space is needed for the graph's adjacency list representation, where V denotes the number of vertices and E is the number of edges. The BFS queue, which, in the worst-case scenario, might have a maximum size of V, is the source of the extra space complexity. Because of the space needed for the BFS traversal and the graph representation, the code's overall space complexity is O(V + E). |
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








