| |

AVL Trees OperationsIn 1962, GM Adelson-Velsky and EM Landis created the AVL Tree. To honors the people who created it, the tree is known as AVL. The definition of an AVL tree is a height-balanced binary search tree in which each node has a balance factor that is determined by deducting the height of the node's right sub tree from the height of its left sub tree. If each node's balance factor falls between -1 and 1, the tree is considered to be balanced; otherwise, the tree needs to be balanced. Balance FactorBalance Factor (k) = height (left(k)) - height (right(k))
Why use AVL Trees?The majority of BST operations, including search, max, min, insert, delete, and others, require O(h) time, where h is the BST's height. For a skewed Binary tree, the cost of these operations can increase to O(n). We can provide an upper bound of O(log(n)) for all of these operations if we make sure that the height of the tree stays O(log(n)) after each insertion and deletion. An AVL tree's height is always O(log(n)), where n is the tree's node count. Operations on AVL TreesDue to the fact that, AVL tree is also a binary search tree hence, all the operations are conducted in the same way as they are performed in a binary search tree. Searching and traversing do not lead to the violation in property of AVL tree. However, the actions that potentially break this condition are insertion and deletion; as a result, they need to be reviewed.
Insertion in AVL TreesWe must add some rebalancing to the typical BST insert procedure to ensure that the provided tree stays AVL after each insertion. The following two simple operations (keys(left) key(root) keys(right)) can be used to balance a BST without going against the BST property.
The steps to take for insertion are:
The procedures to be carried out in the four circumstances indicated above are listed below. In every instance, we only need to rebalance the subtree rooted with z, and the entire tree will be balanced as soon as the height of the subtree rooted with z equals its pre-insertion value (with the proper rotations). 1. Left Left Case 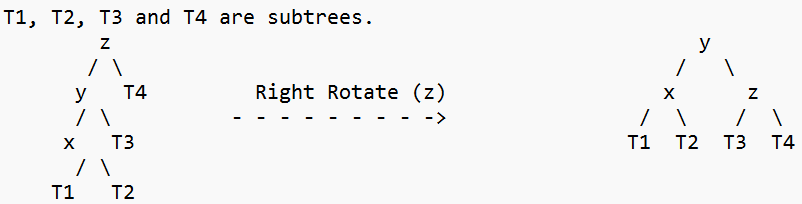
2. Left Right Case 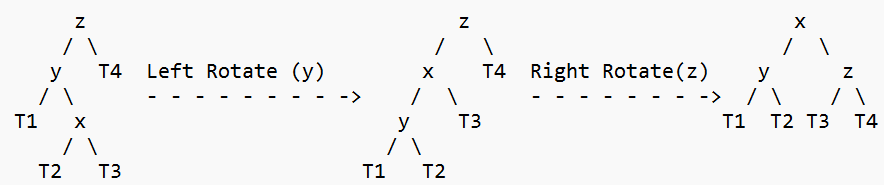
3. Right Right Case 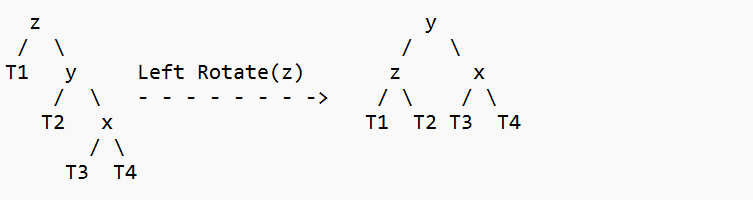
4. Right Left Case 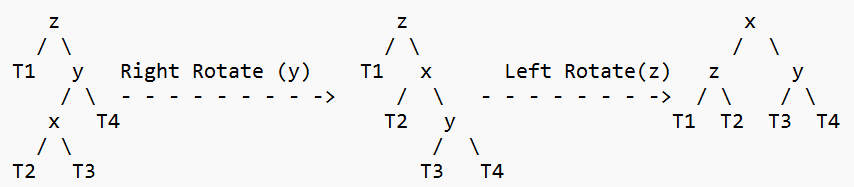
Approach for InsertionThe concept is to utilize recursive BST insert, where after insertion, we receive bottom-up pointers to each ancestor individually. Therefore, to go up, we don't require a parent pointer. The recursive code itself ascends and visits every node that was previously inserted. To put the concept into practise, adhere to the procedures listed below:
Program for insertion:Output Preorder traversal of the constructed AVL tree is 30 20 10 25 40 50 ...................................................................................... Process executed in 1.22 seconds Press any key to continue Explanation Only a few points are updated during the rotation operations (left and right rotate), hence the time required is constant. It also takes a consistent amount of time to update the height and obtain the balancing factor. As a result, the AVL insert has the same temporal complexity as the BST insert, which is O(h), where h is the tree's height. The height is O since the AVL tree is balanced (Logn). Thus, the AVL insert's temporal complexity is O(Logn). Comparing it with Red Black TreeRed Black Tree: The additional bit that each node possesses in a red-black tree, a type of self-balancing binary search tree, is frequently understood as the color (red or black). The balance of the tree is maintained throughout insertions and deletions thanks to the employment of these colors. Although the tree's balance is not ideal, it is sufficient to cut down on searching time and keep it at or below O(log n), where n is the total number of tree components. The Rudolf Bayer invented this tree in 1972. All fundamental operations may be completed in O(log n) time by using the AVL tree and other self-balancing search trees like Red Black. Compared to Red-Black Trees, AVL Trees are more evenly distributed, although they may result in more rotations during insertion and deletion. Red Black trees are thus recommended if your application includes frequent, frequent insertions and removals. Additionally, the AVL tree should be chosen over the Red Black Tree if searches are performed more often and insertions and deletions are less frequent. Deletion in AVL TreesWe must add some rebalancing to the typical BST delete procedure to ensure that the supplied tree stays AVL after each deletion. The following two simple operations (keys(left) key(root) keys(right)) can be used to rebalance a BST without going against the BST property.
The tree's T1, T2, and T3 subtrees are rooted with y (on the left side) or x. (on right side) 
The order of the keys in the two trees mentioned above is as follows: keys(T1) < key(x) < keys(T2) < key(y) < keys(T3) Let w represent the removed node:
The procedures to be carried out in the aforementioned 4 circumstances are as follows, just like insertion. Be aware that, unlike insertion, repairing node z won't result in a full fix of the AVL tree. 1. Left Left Case 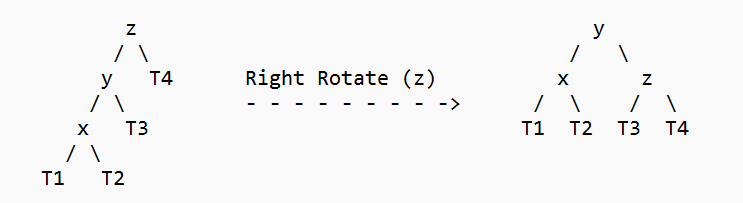
2. Left Right Case 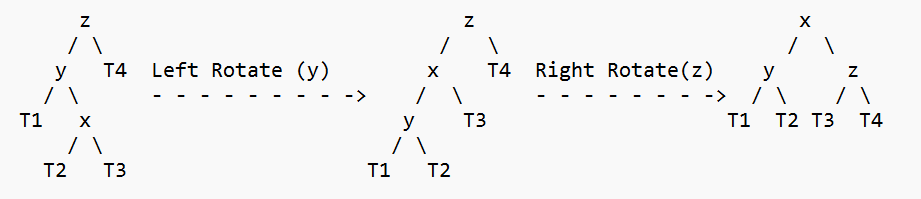
3. Right Right Case 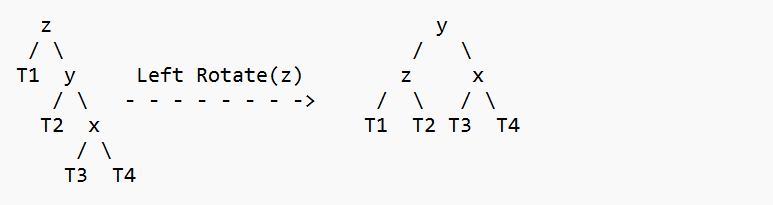
4. Right Left Case 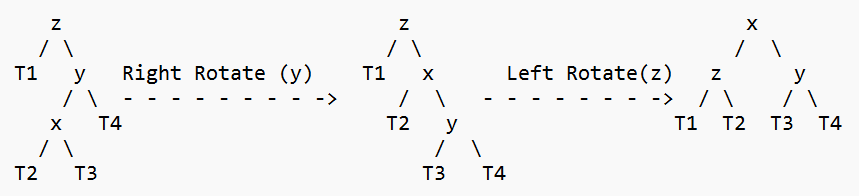
In contrast to insertion, rotation at z may be followed by rotation at z's ancestors in deletion. In order to get to the root, we must thus keep following the path. Approach for DeletionThe AVL Tree Deletion C implementation is provided below. The recursive BST delete is the foundation of the following C implementation. After the deletion in the recursive BST delete, we receive bottom-up pointers to each ancestor in turn. Therefore, ascending doesn't require the parent pointer. The recursive code itself ascends and accesses each of the removed node's ancestors.
Program for deletion in COutput Preorder traversal of the constructed AVL tree is 9 1 0 -1 5 2 6 10 11 Preorder traversal after deletion of 10 1 0 -1 9 5 2 6 11 ..................................................................................... Process executed in 2.11 seconds Press any key to continue Explanation The time required is constant since only a small number of points are updated during the rotation operations (left and right rotate). Getting the balance factor and updating the height both take time. As a result, the AVL delete has O(h), where h is the height of the tree, the same temporal complexity as the BST delete. The height is O as a result of the AVL tree's balance (Logn). Thus, the temporal complexity of AVL delete is O. (Log n). The benefits of AVL trees:
Summary
Next TopicLimitations of Stack in Data Structures
|
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








