| |
DS Tutorial
DS Array
DS Linked List
DS Stack
DS Queue
DS Tree
DS Graph
DS Searching
DS Sorting
Differences
Misc
DS MCQ

Burn the binary tree starting from the target nodeIntroductionBurning a binary tree beginning from a particular node is a fascinating issue in computer science, frequently experienced in algorithmic interviews and competitive programming. This task includes reproducing the spread of fire from a given node all through the binary tree and deciding the time it takes for the whole tree to burn. In this article, we will discuss into different ways to deal with and tackle this issue utilizing the C programming language. Prior to delving into the solutions, we should get a handle on the problem statement. We're given a binary tree, where every node contains a value, and we really want to start a fire at a particular objective node. The fire spreads from the objective node to its adjacent nodes (left and right children) and keeps spreading until all nodes are burnt. Our goal is to ascertain the time it takes for the whole tree to burn down. Depth-First Search One of the intuitive solutions for this issue includes utilizing a Depth-First Search traversal technique. We can recursively traverse the tree, beginning from the objective node, and monitor the time it takes for the fire to arrive at each node. Code Output: 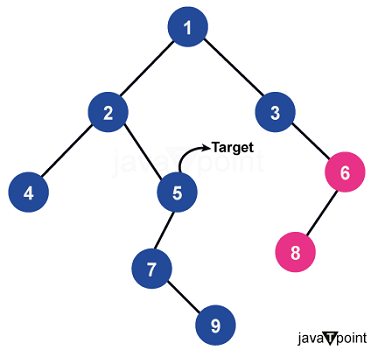
Code Explanation Structure Definition
Max Function
DFS Function
BurnTime Function
Main Function
ConclusionBurning a binary tree beginning from a particular node presents an intriguing algorithmic test. In this article, we investigated the issue of articulation and examined one of the ways to deal with addressing it by utilizing Depth first search in the C programming language. The provided C code scrap exhibits how to execute this methodology and calculate the time it takes for the whole tree to burn beginning from a given objective node. Seeing such issues upgrades our critical thinking abilities as well as reinforces our grip on tree traversal algorithms. |
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








